Rayleigh-Taylor Instability#
This example simulates the dynamic evolution of the single-mode Rayleigh-Taylor instability [1] generated by a density difference.
Features#
Solver:
lethe-fluidMesh adaptation using phase indicator
Periodic boundary condition
Unsteady problem handled by an adaptive BDF2 time-stepping scheme
Monitoring mass conservation
Projection-based interface sharpening
Files Used in This Example#
All files mentioned below are located in the example’s folder (examples/multiphysics/rayleigh-taylor-instability).
Parameter file:
rayleigh-taylor-instability.prmPostprocessing Python script:
rayleigh-taylor_postprocess.py
Description of the Case#
In this example, we simulate the Rayleigh-Taylor instability benchmark. In this benchmark, a dense fluid, as shown in the following figure, is located on top of a fluid with a smaller density.

|
- The density ratio and viscosity ratio of the heavy (
fluid 1) and light (fluid 0) fluids are - \[\rho_r = \frac{\rho_h}{\rho_l} = 3\]\[\mu_r = \frac{\mu_h}{\mu_l} = 3\]
- which result in Reynolds and Atwood numbers equal to
- \[Re = \frac{\rho_h H \sqrt{H \bf{g} }}{\mu_h} = 256\]\[At = \frac{\rho_r - 1}{\rho_r + 1} = 0.5\]
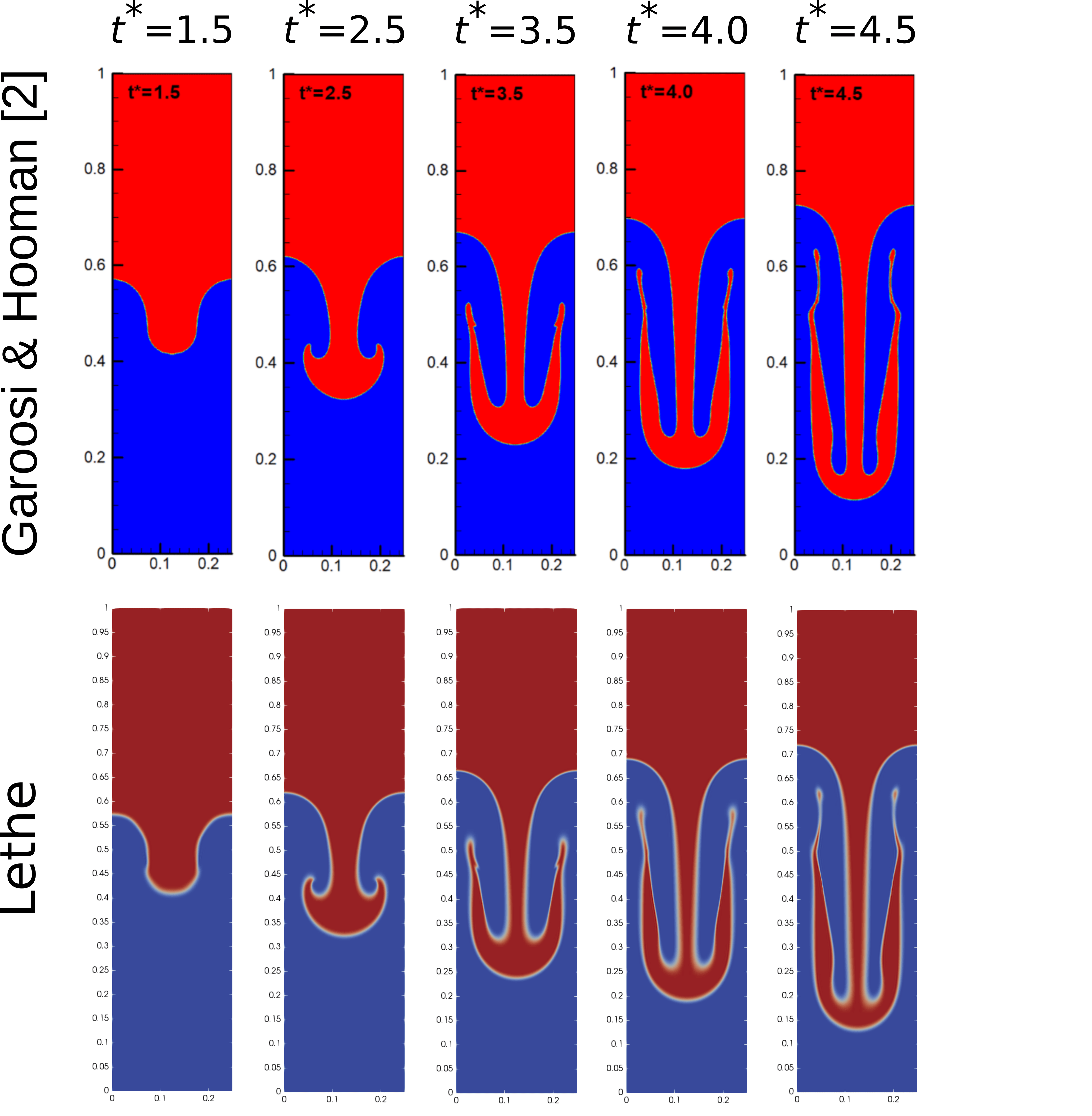
A perturbed interface defined as \(y = 2H + 0.1 H \cos{(2 \pi x / H)}\) separates the fluids. At the top and bottom boundaries, a no-slip boundary condition is applied, while on the left and right walls, periodic boundary conditions are used (although we could also use slip boundary conditions and obtain identical results). The temporal evolution of the interface is visually compared with the simulations of Garoosi and Hooman [2] at dimensionless times (\(t^* = t \sqrt{\mathbf{g} / H}\)) of \(1.5\), \(2.5\), \(3.5\), \(4.0\) and \(4.5\). The temporal evolution of the spike and the bubble positions are then compared to the results of He et al. [1] The term “spike” refers to the lowest point of fluid 1 and the term “bubble” refers to the highest point of fluid 0.
Parameter File#
Simulation Control#
Time integration is handled by a 2nd order backward differentiation scheme
(bdf2), for a \(0.75\, \text{s}\) simulation time with an initial
time step of \(0.0002\) seconds. Time-step adaptation is enabled using adapt time step to respect CFL` = true
and the max CFL is \(0.8\).
Note
This example uses an adaptive time-stepping method, where the time step is modified during the simulation to keep the maximum value of the CFL condition below a given threshold (\(0.8\) here).
subsection simulation control
set method = bdf2
set time end = 0.75
set time step = 0.001
set adapt time step to respect CFL = true
set max cfl = 0.8
set output control = iteration
set output frequency = 20
set output name = rayleigh-taylor
set output path = ./output/
end
Multiphysics#
The multiphysics subsection enables to turn on (true) and off (false) the physics of interest. Here CLS and fluid dynamics are chosen (fluid dynamics is true by default).
subsection multiphysics
set cls = true
end
Source Term#
The source term subsection defines gravitational acceleration.
subsection source term
subsection fluid dynamics
set Function expression = 0 ; -9.81 ; 0
end
end
Physical Properties#
The physical properties subsection defines the physical properties of the fluid. In this example, we need two fluids with densities of \(100\) and \(300\) and with an equal kinematic viscosity (\(0.00153\)).
subsection physical properties
set number of fluids = 2
subsection fluid 0
set density = 100
set kinematic viscosity = 0.00153
end
subsection fluid 1
set density = 300
set kinematic viscosity = 0.00153
end
end
Initial Conditions#
In the initial conditions subsection, we need to define the interface between the heavy and light fluids. We define this interface by using a Function expression in the CLS subsection of the initial conditions. The interface between the two fluids is made smoother with the geometric smoother by setting the parameter smoothing type to geometric. Essentially, the geometric smoother converts the initial function expression into a signed distance function using the geometric reinitialization algorithm. This defines a smooth initial condition that is coherent with the reinitialization used within the simulation.
subsection initial conditions
set type = nodal
subsection uvwp
set Function expression = 0; 0; 0
end
subsection CLS
set Function expression = y - (0.5 + 0.1 * 0.25 * cos(2 *3.1415 * x / 0.25)) + 0.5
set smoothing type = geometric
end
end
Mesh#
In the mesh subsection we configure the simulation domain. The initial refinement of the mesh is equal to \(5\), but we use mesh adaptation to coarsen the mesh in cells far from the interface to improve the computation performance.
subsection mesh
set type = dealii
set grid type = subdivided_hyper_rectangle
set grid arguments = 1, 4 : 0.25, 1 : 0 , 0 : true
set initial refinement = 5
end
Mesh Adaptation#
The mesh adaptation section controls the dynamic mesh adaptation. Here, we choose phase as the refinement variable and \(5\) as the min refinement level.
We set initial refinement steps = 4 to adapt the mesh to the initial value of the CLS field.
subsection mesh adaptation
set type = adaptive
set error estimator = kelly
set variable = phase
set fraction type = fraction
set max refinement level = 7
set min refinement level = 5
set frequency = 1
set fraction refinement = 0.99
set fraction coarsening = 0.01
set initial refinement steps = 4
end
Boundary Conditions#
The boundary conditions applied on the left and right boundaries are periodic, while a noslip boundary condition is used for the top and bottom walls.
subsection boundary conditions
set number = 3
subsection bc 0
set id = 0
set type = periodic
set periodic id = 1
set periodic direction = 0
end
subsection bc 1
set id = 2
set type = noslip
end
subsection bc 2
set id = 3
set type = noslip
end
end
For CLS, we specify the periodic boundary conditions on the sides and no-flux boundary conditions on the top and bottom.
subsection boundary conditions CLS
set number = 3
subsection bc 0
set id = 0
set type = periodic
set periodic id = 1
set periodic direction = 0
end
subsection bc 1
set id = 2
set type = none
end
subsection bc 2
set id = 3
set type = none
end
end
CLS#
In the CLS subsection, we select the geometric interface reinitialization in the interface reinitialization method subsection to reconstruct the interface and keep it sharp during the simulation. This approach is currently the most robust method available in Lethe.
subsection CLS
subsection interface reinitialization method
set type = geometric interface reinitialization
set frequency = 20
set verbosity = verbose
subsection geometric interface reinitialization
set max reinitialization distance = 0.03
set transformation type = tanh
set tanh thickness = 0.015
end
end
subsection phase filtration
set type = tanh
set beta = 10
end
end
The phase filtration is enabled in this example.
We refer the reader to the Conservative Level-Set (Multiphase Flow) documentation for more explanation on the phase filtration.
Post-processing#
In the post-processing subsection, the output of the area of each fluid is enabled and allows to track to mass conservation throughout the simulation. If the area is conserved in a 2D simulation, then the mass per unit length is too. The mass conservation is tracked both from a geometric perspective and from the volumetric integral of the CLS field.
subsection post-processing
set verbosity = verbose
set calculate mass conservation = true
end
Running the Simulation#
Call lethe-fluid by invoking:
to run the simulations using eight CPU cores. Feel free to use more.
Warning
Make sure to compile lethe in Release mode and run in parallel using mpirun. On \(8\) processes, this simulation takes \(\sim\) \(10\) minutes.
Results and Discussion#
The following animation shows the results of this simulation:
In the following figure, we compare the simulation results with that of Garoosi and Hooman (2022) [2].
By invoking the rayleigh-taylor_postprocess.py postprocessing script found within the example folder with
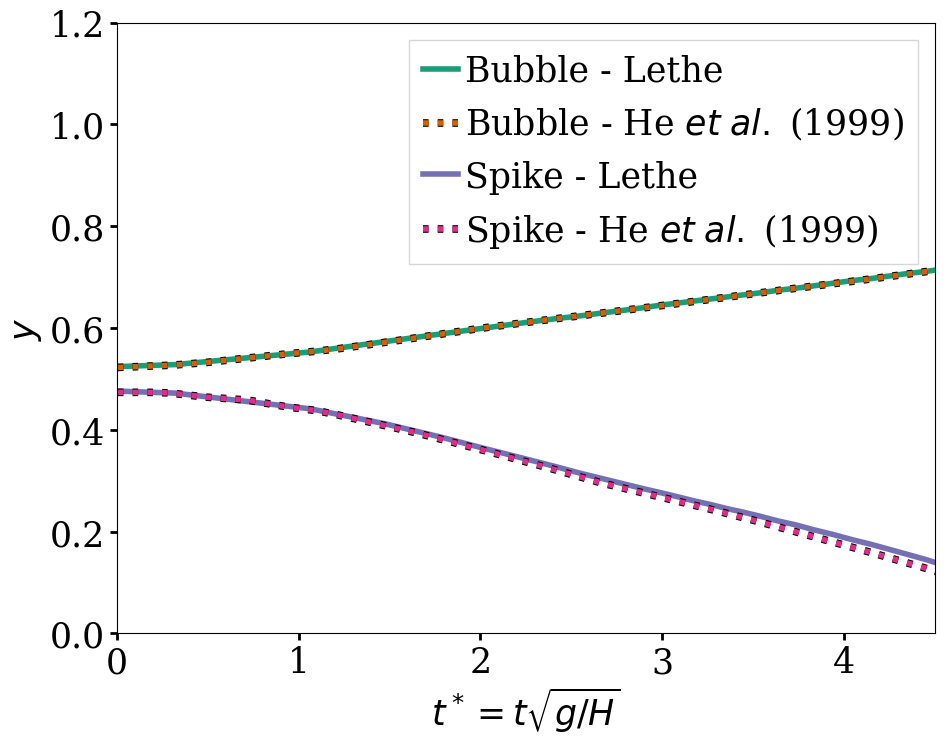
we compare the position of the spike and the bubble with the results of He et al. [1]
In the figure below, it can be seen that as \(t^*\) increases, there is a growing difference between the spike position of the current simulation and that of He et al. [1] Nevertheless, the bubble position follows the same evolution as the reference.
|
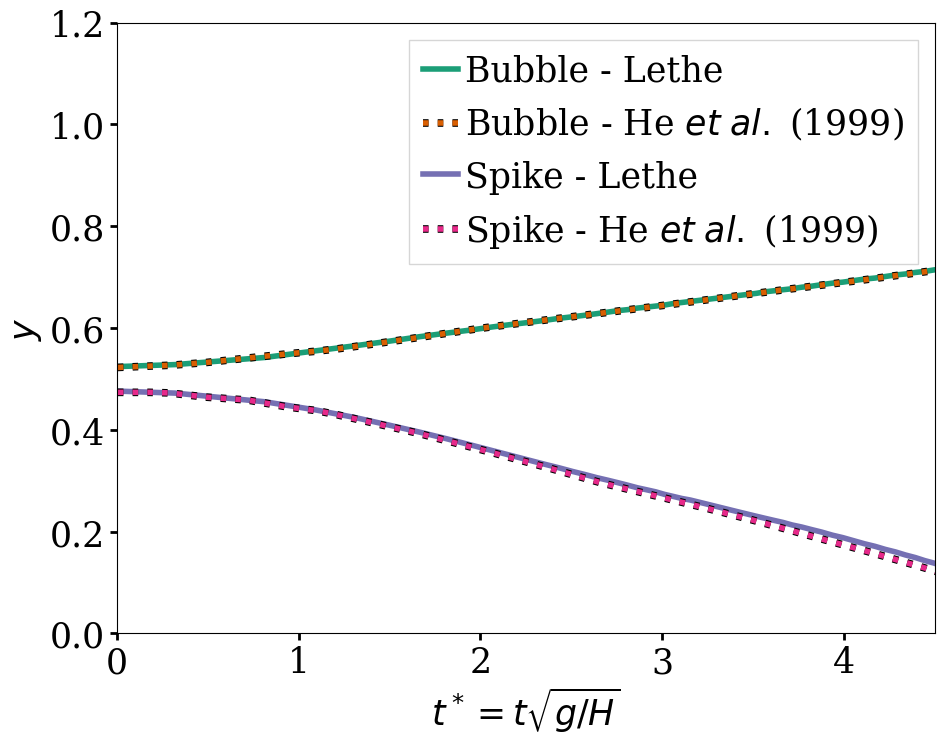
With one higher level of refinement, we can see a similar correspondence between the values and there is still a gap between the spike positions for larger values of \(t^*\).
|
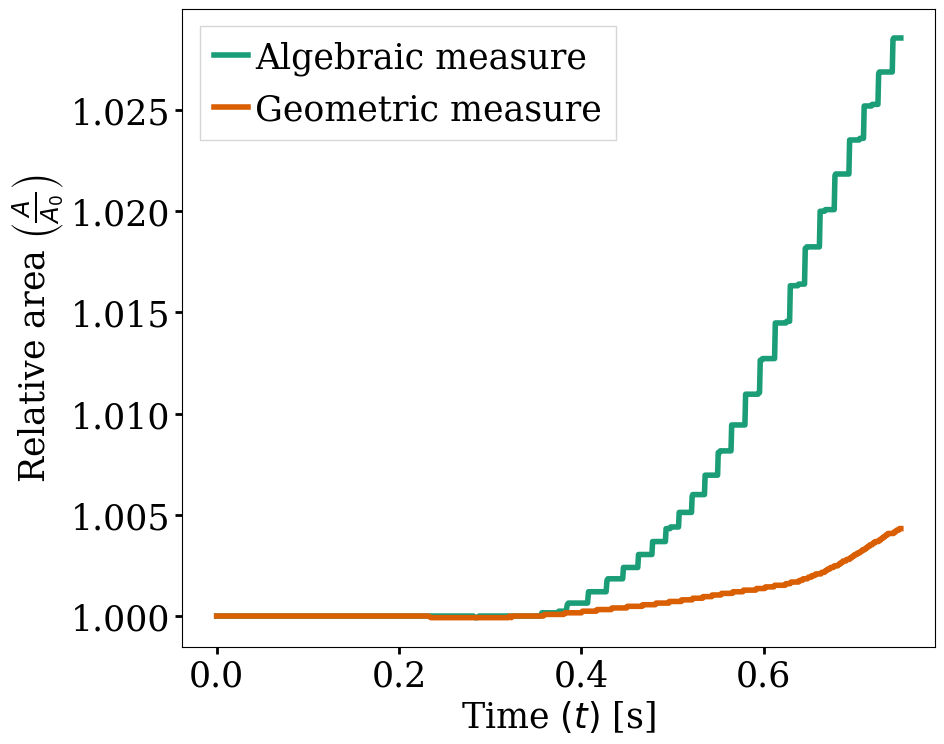
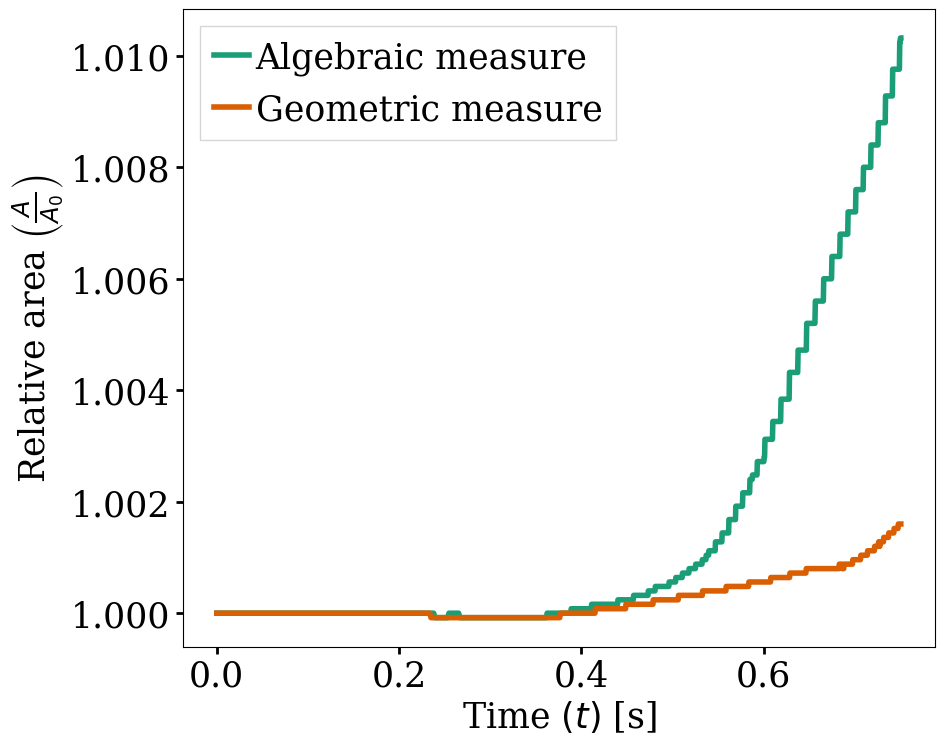
The following figures show the relative area of fluid 1 throughout the simulation from a geometric perspective and from the volumetric integral of the CLS field. The left figure displays the result for the coarser mesh resolution of the example whereas the right figure shows area conservation for the finer mesh. We see that area conservation is not fully preserved once the interface has been significantly stretched and deformed, but it improves as the mesh is refined.
|
|