3D Dam-Break with an Obstacle#
This example simulates a dam-break experiment from the Maritime Research Institute Netherlands (MARIN) [1].
Warning
This example displays the need for improvement of low-viscosity fluid flow simulation of the current numeric model. Further work will be done to improve this aspect of the model.
Features#
Solver:
lethe-fluid(Q1-Q1)Two phase flow handled by the Conservative Level-Set (CLS) approach with phase indicator filtration
Mesh adaptation using phase indicator
Unsteady problem handled by an adaptive BDF1 time-stepping scheme
The use of a python script for post-processing data
Files Used in This Example#
All files mentioned below are located in the example’s folder (examples/multiphysics/3d-dam-break).
Experimental data file:
experimental_data.txtGeometry file:
tank_with_obstacle.geoMesh file:
tank_with_obstacle.mshParameter file:
3d-dam-break.prmPostprocessing Python script:
3d-dam-break_postprocess.py
Description of the Case#
For this example, the simulated fluids are water and air. Initially, the water is at rest on the right side of the tank (represented in dashed blue lines in the figures below). At \(t = 0 \ \text{s}\), the gate opens instantaneously and the water starts flowing under the action of gravity, \(\mathbf{g} = (-9.81 \ \mathbf{j}) \frac{\text{m}}{\text{s}^2}\). The tank in which this experiment happens has the following dimensions: \(3.22 \times 1.00 \times 1.00 \ \text{m}\). On all boundaries, slip conditions were applied. On the left side of the tank, a rectangular box-shaped obstacle is presented (colored in grey in the figures).
Along the x-axis, the water height is measured at 4 different positions. These positions are represented by red crosses in the figure below.
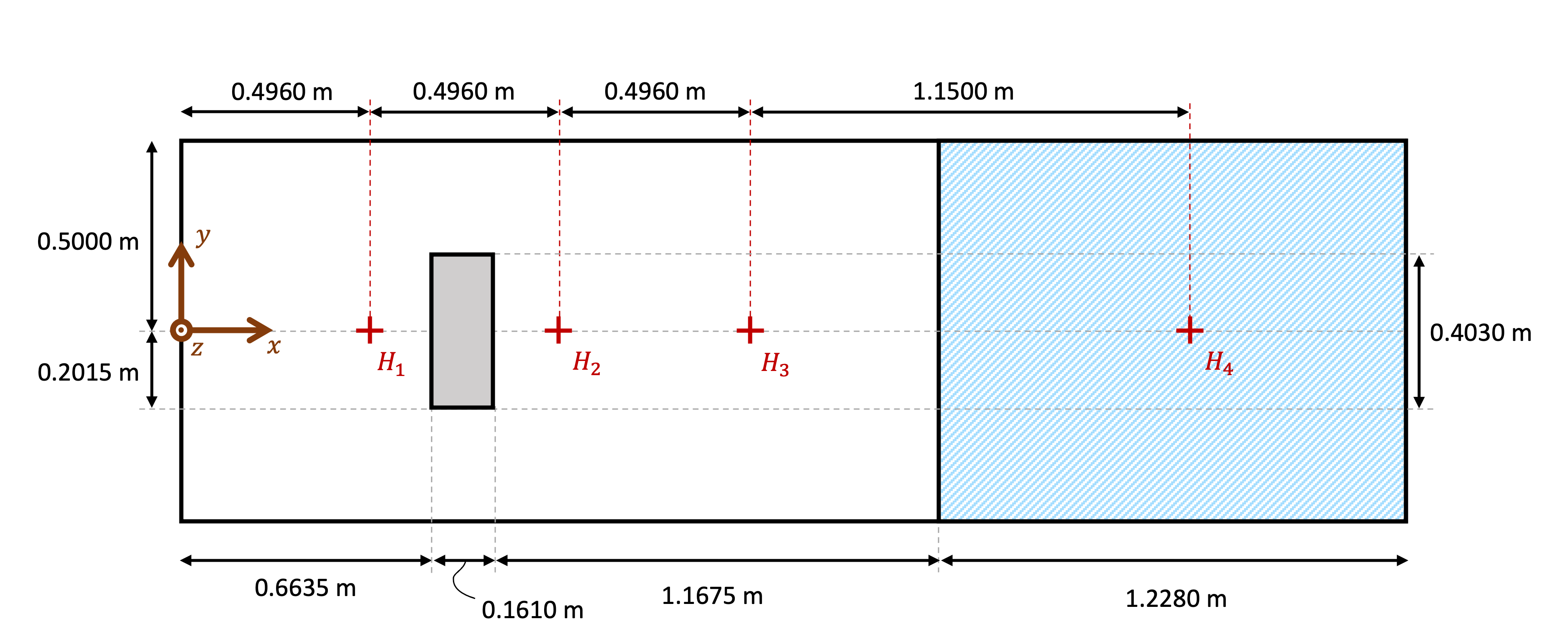
Initial state top view# |
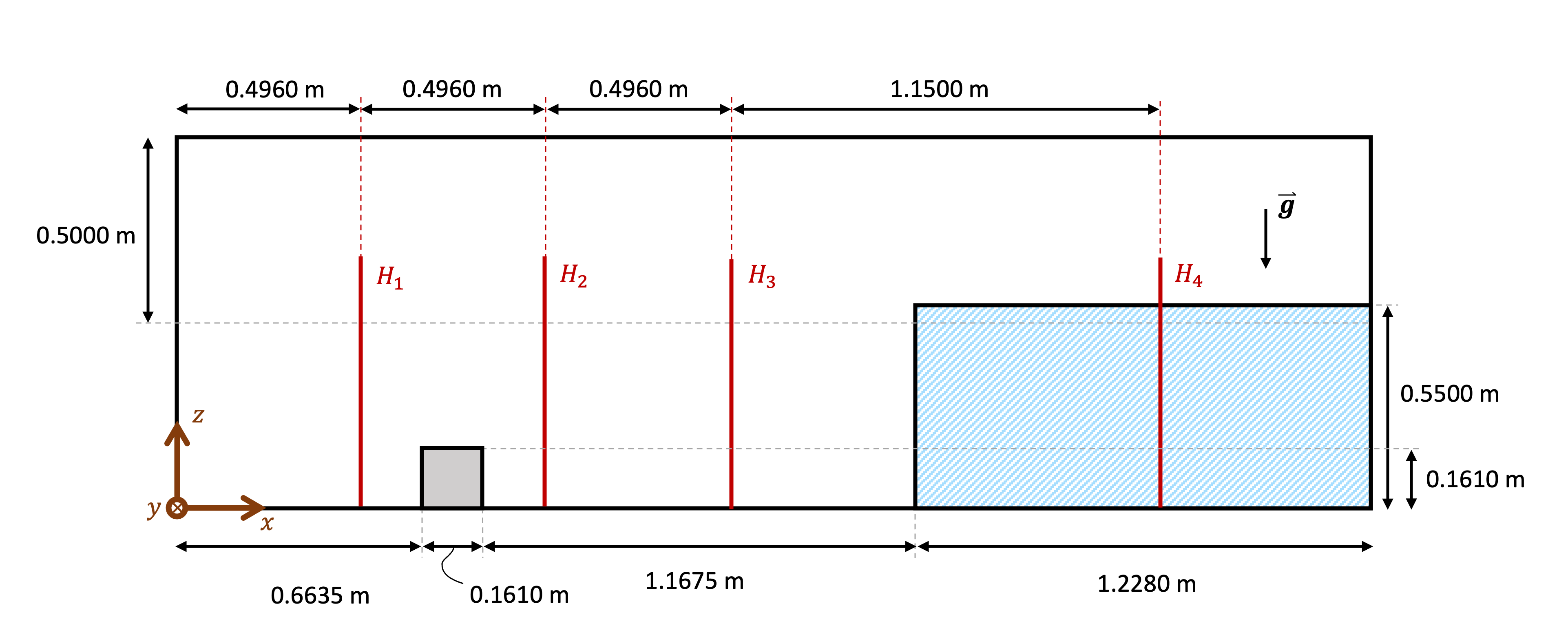
Initial state side view# |
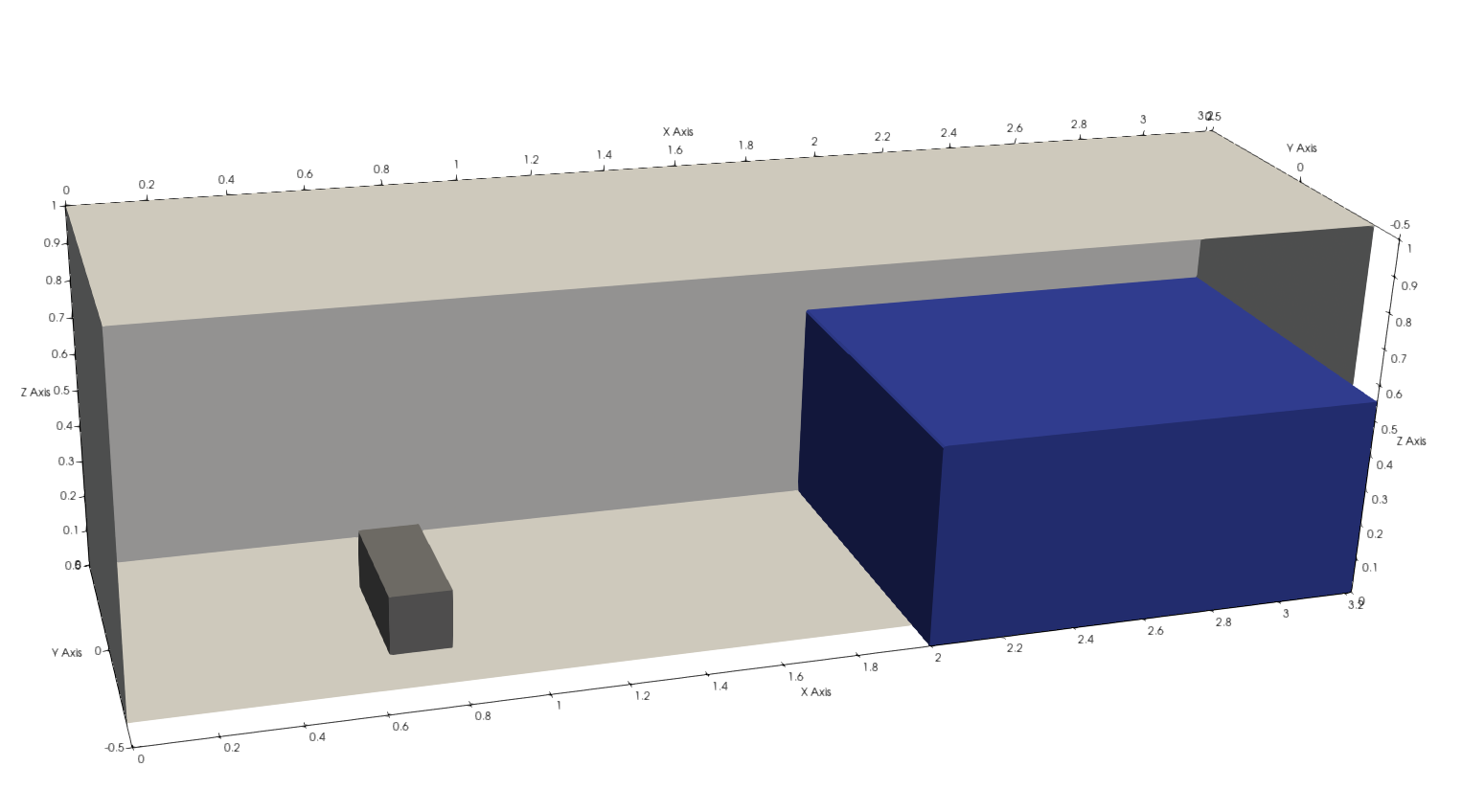
Initial state in 3D# |
Parameter File#
Simulation Control#
Time integration is handled by a 1st order backward differentiation scheme (bdf1), for a \(6 \ \text{s}\) simulation time with an initial time step of \(0.001 \ \text{s}\). Time-step adaptation is enabled using adapt time step to respect CFL` = true
and the max CFL is \(0.8\).
Note
This example uses an adaptive time-stepping method, where the time steps are modified during the simulation to keep the maximum value of the CFL condition below the given threshold (0.5).
subsection simulation control
set method = bdf1
set time end = 6
set time step = 0.001
set adapt time step to respect CFL = true
set max cfl = 0.8
set output name = 3d-dam-break
set output frequency = 5
set output path = ./output/
set adaptative time step scaling = 1.05
set output boundaries = true
end
Multiphysics#
The multiphysics subsection enables to turn on (true)
and off (false) the physics of interest. Here CLS is chosen.
Note that the fluid dynamics are solved by default.
subsection multiphysics
set cls = true
end
Physical Properties#
The physical properties subsection defines the physical properties of the fluids. In this example, we need two fluids with densities of \(1.204 \ \frac{\text{kg}}{\text{m}^3}\) (air) and \(1000 \ \frac{\text{kg}}{\text{m}^3}\) (water). However, the current numerical model was not able to solve with the real dynamic viscosities of the fluids. Therefore, they were altered in order to run the simulation.
Warning
Altering the dynamic viscosities of the fluids will surely have an impact on the results. We will show this impact in the results section.
subsection physical properties
set number of fluids = 2
subsection fluid 0
set density = 1.204
set kinematic viscosity = 0.01516
end
subsection fluid 1
set density = 1000
set kinematic viscosity = 0.001
end
end
Initial Conditions#
In the initial conditions subsection, we need to define the interface between the two fluids. We define this interface by using a function expression in the CLS subsection of initial conditions. A projection step is applied to ensure a smooth definition of the initial condition.
subsection initial conditions
set type = nodal
subsection uvwp
set Function expression = 0; 0; 0; 0
end
subsection CLS
set Function expression = if (x>1.992 & z<0.55 & y>=-0.5, 1, 0)
subsection projection step
set enable = true
set diffusion factor = 1
end
end
end
Source Term#
In the source term subsection, we define the gravitational acceleration.
subsection source term
subsection fluid dynamics
set Function expression = 0;0;-9.81;0
end
end
CLS#
In the CLS subsection, we select the tanh filter to filter the phase indicator and get a more defined interface. We set the value of beta to 10.
subsection CLS
subsection phase filtration
set type = tanh
set beta = 10
end
end
Mesh#
In the mesh subsection, we specify the mesh used in this example. The structured mesh used in this example can be generated from the tank.geo file using Gmsh. The initial refinement is set to \(3\).
subsection mesh
set type = gmsh
set file name = tank.msh
set initial refinement = 3
end
Mesh Adaptation#
The mesh adaptation section controls the dynamic mesh adaptation. Here, we choose phase and pressure as the refinement variables. The maximum and minimum refinement levels are respectively set to \(4\) and \(2\).
subsection mesh adaptation
set type = adaptive
set error estimator = kelly, kelly
set variable = phase, pressure
set fraction type = fraction
set max refinement level = 4
set min refinement level = 2
set frequency = 2
set fraction refinement = 0.999, 0.4
set fraction coarsening = 0.001, 0.05
set initial refinement steps = 5
end
Running the Simulation#
We call the lethe-fluid by invoking:
Warning
Make sure to compile Lethe in Release mode and run in parallel using mpirun. This simulation took \(\approx\) 17 hours on 64 processes (run on the Narval cluster).
Results#
The following video shows the results of the simulation:
In the following figure, we compare the water height evolution at the 4 positions mentioned in the description of the case section with the experimental results obtained from MARIN (available here):
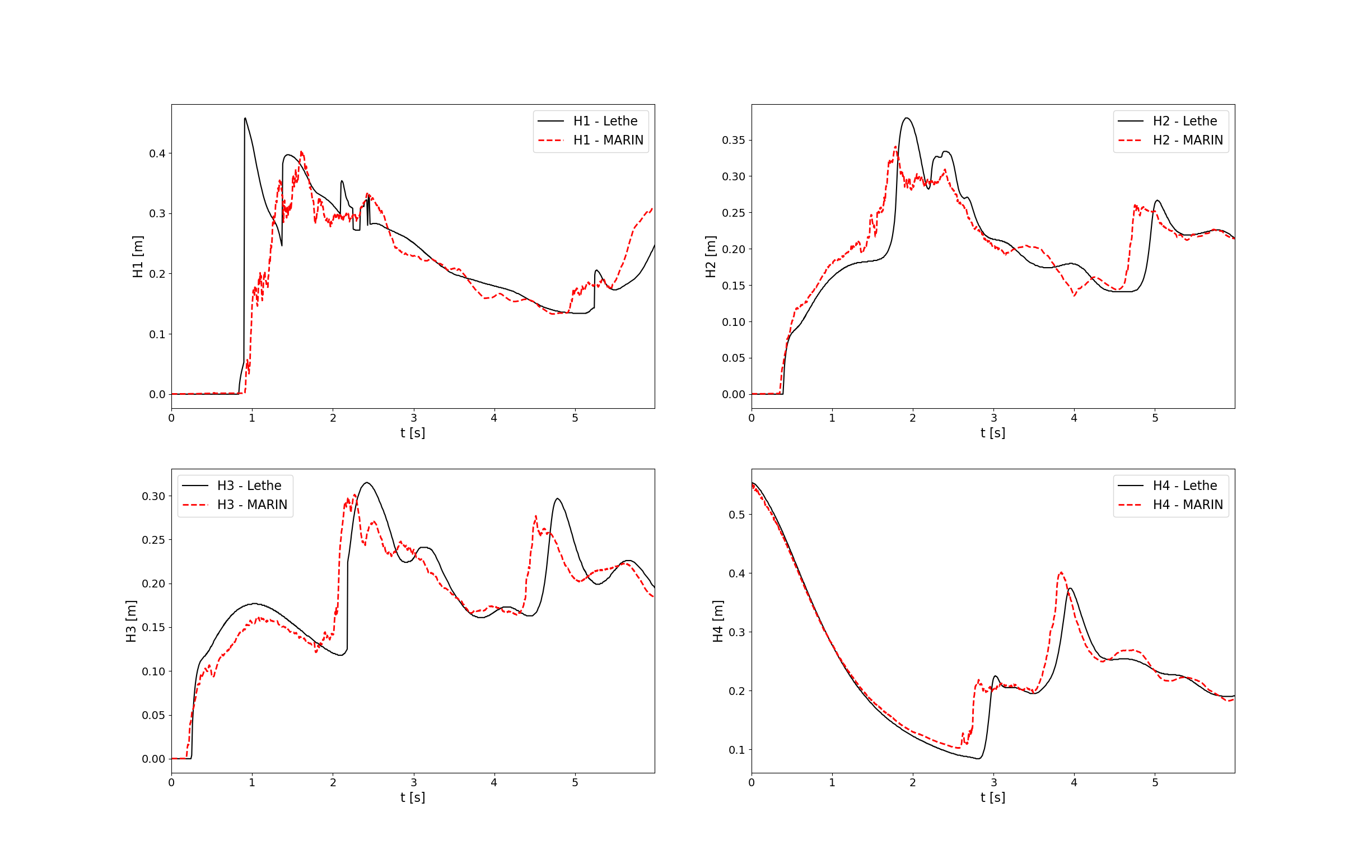
Comparison of the water height evolution# |
As we can see, the simulated general evolution of the height seems to follow the experimentation results. However, on all 4 subplots, we notice that the height is overestimated. We also notice a slight shift to the right for \(H2\), \(H3\), and \(H4\) evolutions. These observations may be explained by the “highly viscous air” (fluid 0) that acts as an obstacle to the free flow of the water. Additionally, fluid 1 representing the water is 1000 times more viscous than regular water. With these results, we can see that the model needs to be improved to be able to accurately simulate low-viscosity fluids such as air. Furthermore, we observe that the wave formed at the impact with the obstacle doesn’t collapse the right way due to the lack of compressibility of the air being simulated.